Abstract
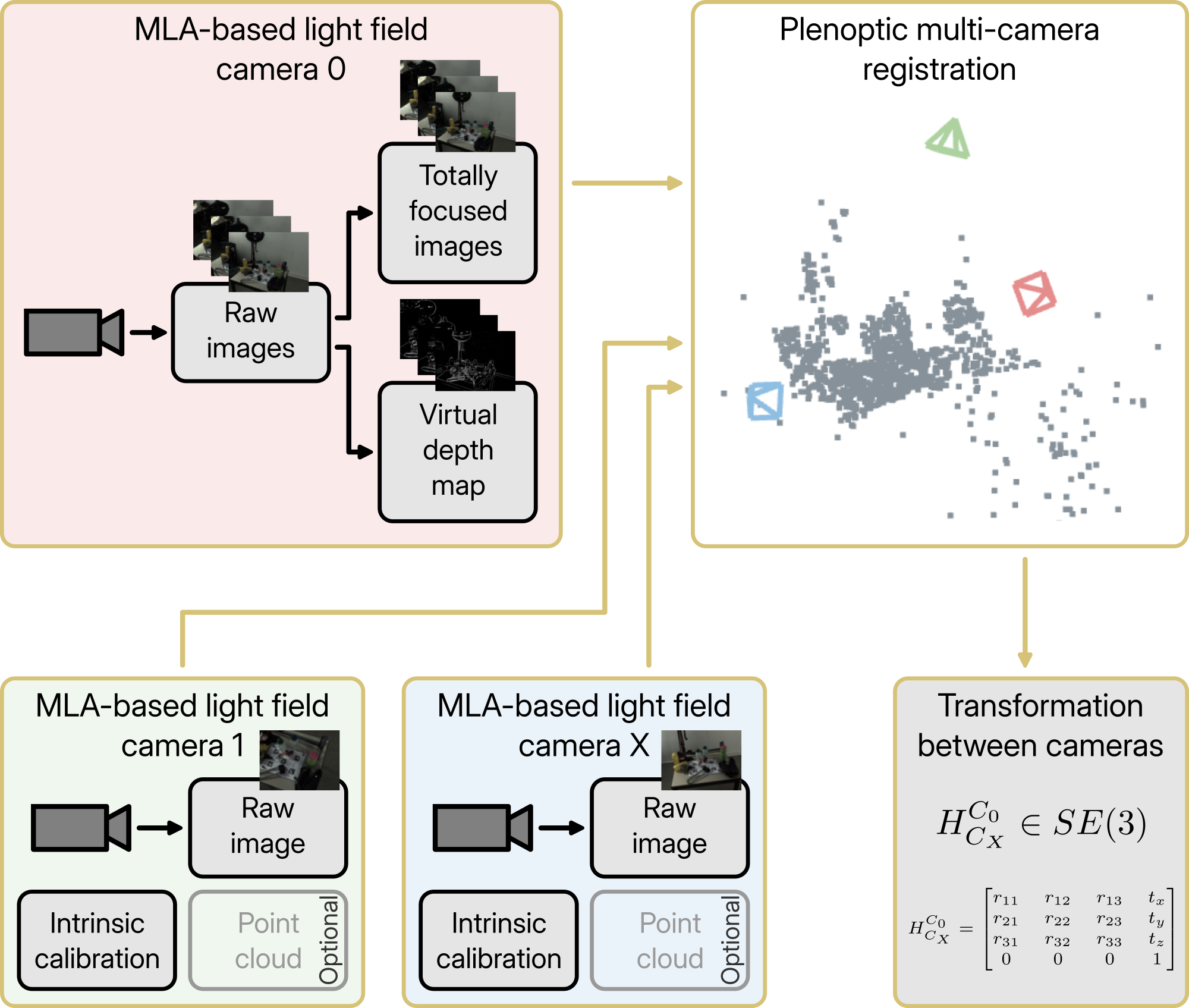
We present LiFMCR, a novel dataset for the registration of multiple MLA-based light field cameras. While existing light field datasets are limited to single-camera setups and typically lack external ground truth, LiFMCR provides synchronized image sequences from two high-resolution Raytrix R32 plenoptic cameras, together with high-precision 6-DOF poses recorded by a Vicon motion capture system. This unique combination enables rigorous evaluation of multi-camera light field registration methods.
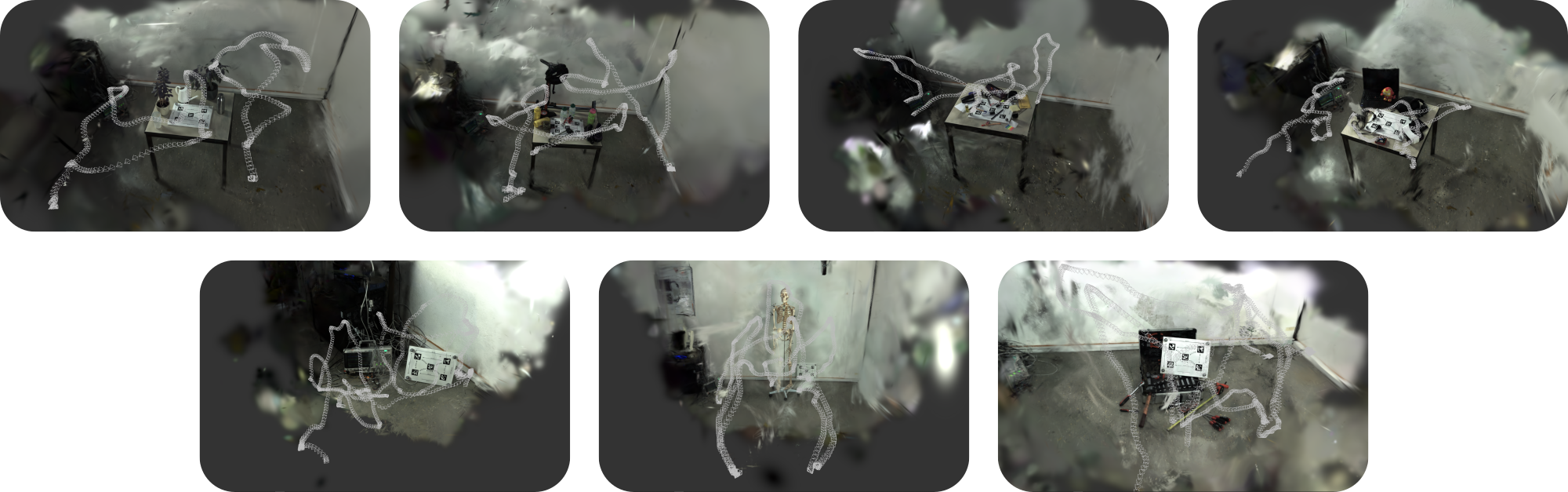
As a baseline, we provide two complementary registration approaches: a robust 3D RANSAC-based method using cross-view point clouds, and a plenoptic PnP algorithm estimating extrinsic 6-DOF poses from single light field images. Both explicitly integrate the plenoptic camera model, enabling accurate and scalable multi-camera registration. Experiments show strong alignment with ground truth, supporting reliable multi-view light field processing.
Dataset
| Scene | Sequence type | Number of frames |
|---|---|---|
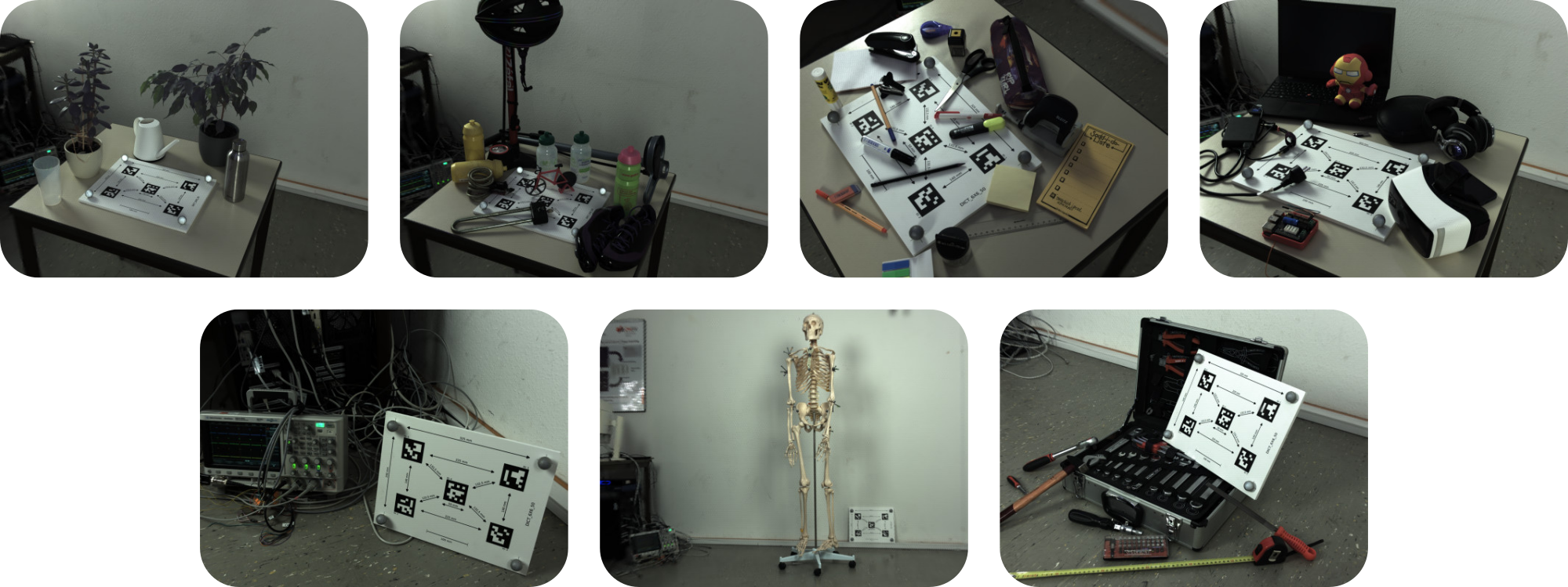
| 01_Plants | Random camera movements | 323 |
| Handheld movements around the scene | 632 | |
| 02_Bike | Random camera movements | 434 |
| Handheld movements around the scene | 781 | |
| Movements in x, y, z directions | 250 | |
| 03_Office | Random camera movements | 328 |
| Handheld movements around the scene | 688 | |
| Fast movements | 247 | |
| 04_Electronics | Random camera movements | 323 |
| Handheld movements around the scene | 185 | |
| Random movements with lower exposure | 428 | |
| 05_Oscilloscope | Random camera movements | 406 |
| 06_Skeleton | Random camera movements | 533 |
| Handheld close movements | 758 | |
| Cameras in circle | 677 | |
| 07_Tools | Random camera movements | 471 |
Pipeline

License Terms
LiFMCR was developed in collaboration between the Technical University of Munich and the Karlsruhe University of Applied Sciences. The code is open-source under a GNU General Public License Version 3 (GPLv3).
BibTeX
@inproceedings{FleithZirbel2025LiFMCR,
title = {LiFMCR: Dataset and Benchmark for Light Field Multi-Camera Registration},
author = {Fleith, Aymeric and Zirbel, Julian and Cremers, Daniel and Zeller, Niclas},
booktitle = {International Symposium on Visual Computing (ISVC)},
year = {2025},
}